About
 I am an Artificial Intelligence researcher that aims to make machines more adaptive and creative. My research is focused on computational evolution, deep learning, and crowdsourcing, with applications in robotics, video games, design, and art. I have recently been awarded an ERC Consolidator grant for my project GROW-AI: Growing Machines Capable of Rapid Learning in Unknown Environments.
I am an Artificial Intelligence researcher that aims to make machines more adaptive and creative. My research is focused on computational evolution, deep learning, and crowdsourcing, with applications in robotics, video games, design, and art. I have recently been awarded an ERC Consolidator grant for my project GROW-AI: Growing Machines Capable of Rapid Learning in Unknown Environments.
My research asks questions such as: Can we create lifelong learning machines that continuously acquire new knowledge and skills? Can we grow machines that learn from and work together with humans to solve tasks that neither humans nor machines can solve by themselves?
I am the director of the Creative AI Lab, and co-direct the Robotics, Evolution and Art Lab (REAL) at the IT University of Copenhagen. I am also a co-founder of modl.ai, a company that develops AI techniques for game development. Our research has been covered in different news outlets such as Science, New Scientist, Wired, Popular Mechanics, The Register, and Popular Science.
Selected Projects
MarioGPT: Open-Ended Text2Level Generation through Large Language Models
[Code, Twitter Thread], Press coverage in TechCrunch, Golem, Kotaku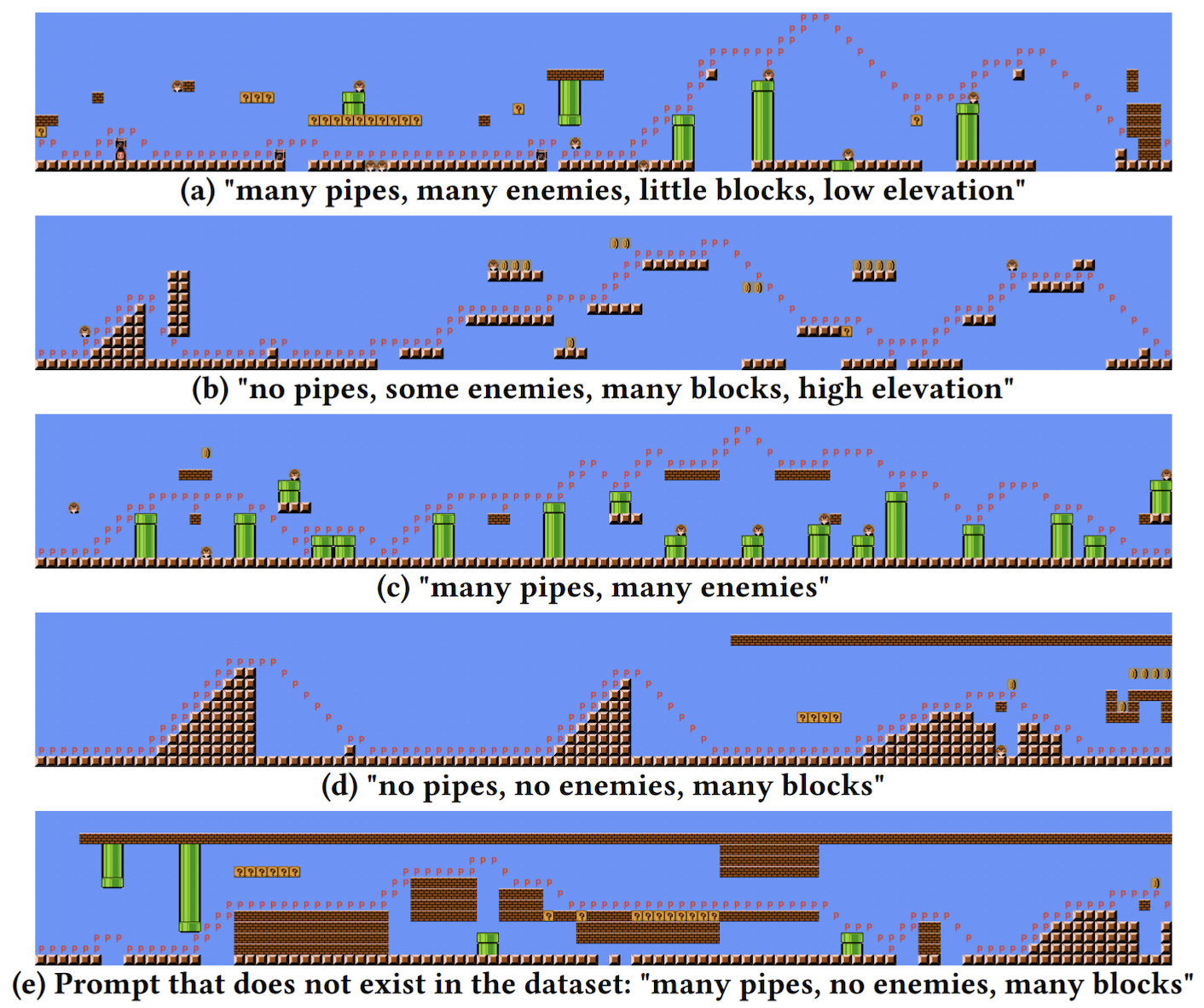
Variational Neural Cellular Automata
ICLR 2022 [Code]

Growing 3D Artefacts and Functional Machines with Neural Cellular Automata
Artificial Life 2021, [Code], Press Coverage in Science, Fast Company.
Meta-Learning through Hebbian Plasticity in Random Networks
NeurIPS 2020, [Code], Press coverage in Science.
Increasing generality in machine learning through procedural content generation
Evolving Mario Levels in the Latent Space of a Deep Convolutional Generative Adversarial Network [code]
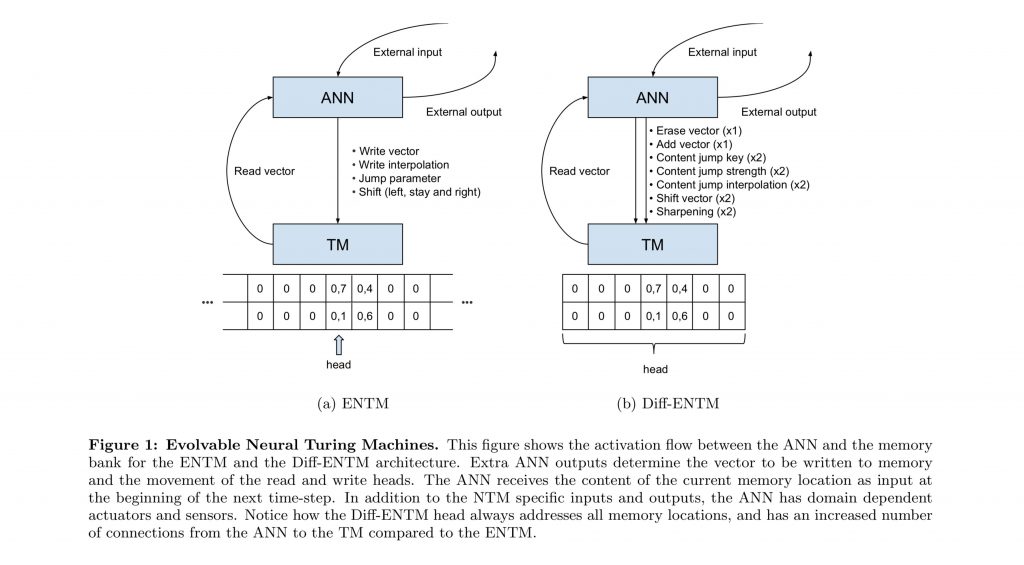
Evolving Neural Turing Machines for Reward-based Learning
1D Printing of Recyclable Robots
Highlights:
- Sapere Aude: DFF Starting Grant, 2019
- Amazon and Google Faculty Research Awards, 2019
- Distinguished Young Investigator award 2018, International Society for Artificial Life
- Over ten best paper awards
- PI for ITU, DARPA project: Super Turing Evolving Lifelong Learning ARchitecture (STELLAR), 2018 – 2021
- Co-PI, Horizon 2020 – Future & Emerging Technologies (FET) Proactive Flora-Robotica, 2015 – 2019
CV: PDF